|
Zikang Shan(单子康) Email: shanzikang [at] stu.pku.edu [dot] cn I am a first-year Ph.D. student at Peking University, advised by Prof. Liwei Wang. Currently, I am also a research intern at Microsoft Research Asia. Before that, I received my Bachelor's degree from Peking University. During my undergraduate years, I was honored to be advised by Prof. Liwei Wang and Prof. He Wang. Please feel free to contact me if you want to discuss or collaborate! |
News |
| May 1, 2025 | Paper accepted at ICML (Spotlight). See you in Vancouver! |
ResearchI am interested in reinforcement learning, believing its potential remains underexplored today as both a general learning paradigm and a local behavior optimizer. Recently, I particularly focus on applying RL to large language models, viewing reinforcement learning as a critical direction to scale up model capabilities with compute when high quality data grows increasingly scarce. |
|
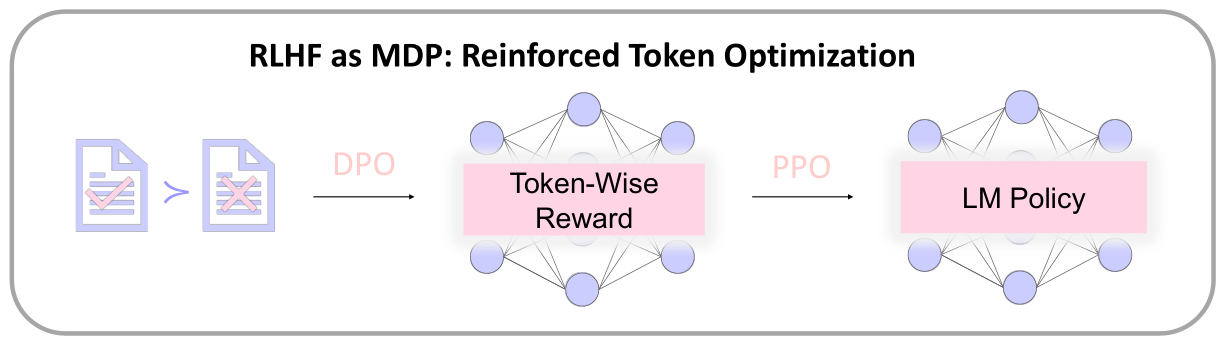
DPO Meets PPO: Reinforced Token Optimization for RLHF
Han Zhong*, Zikang Shan*, Guhao Feng*, Wei Xiong, Xinle Cheng, Li Zhao, Di He, Jiang Bian, Liwei Wang ICML, 2025, Spotlight Paper | Code Based on theoretical insights, we propose an alignment algorithm that is sample efficient and effective. |
|
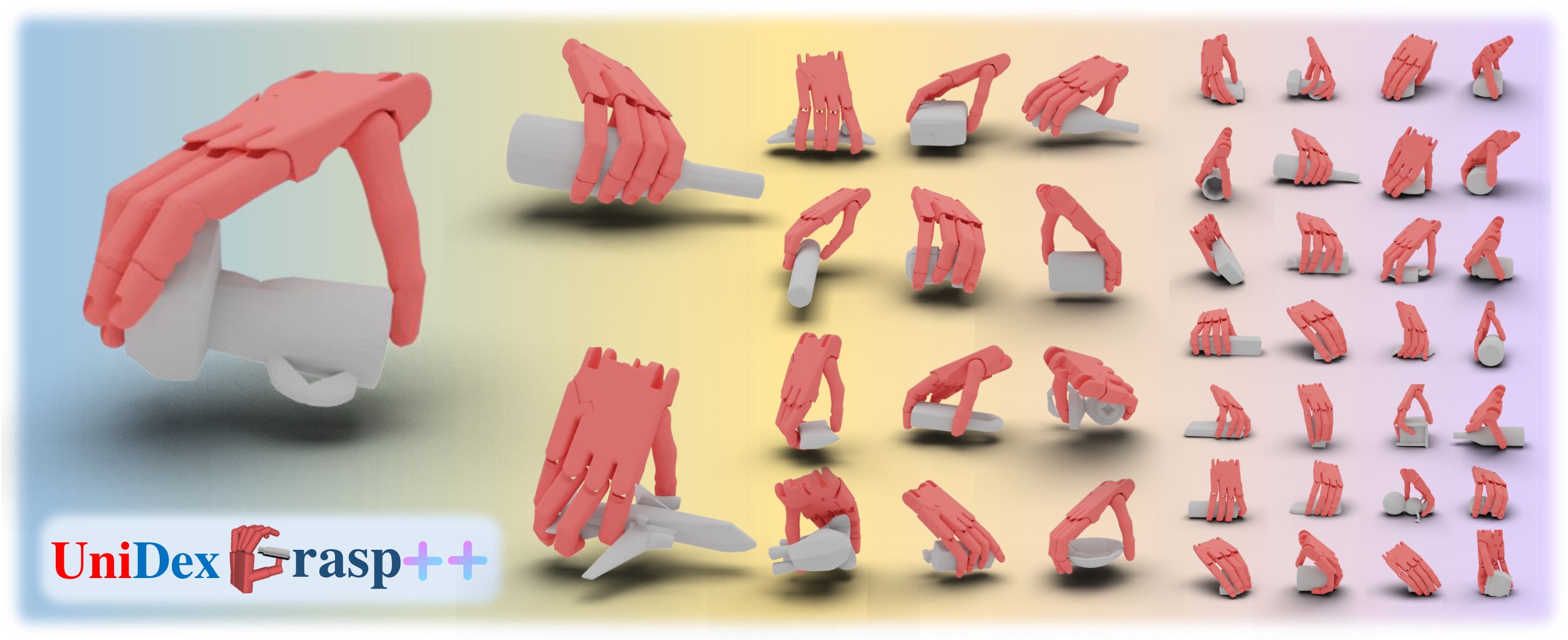
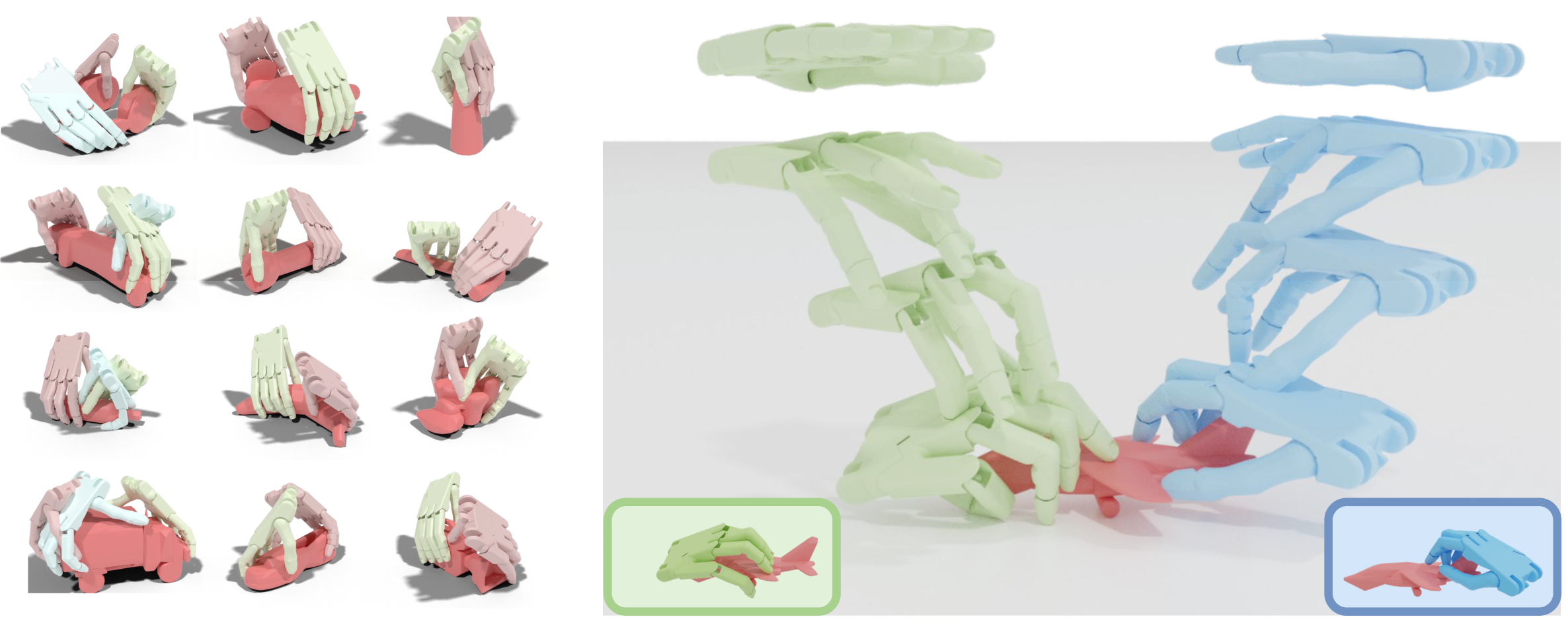
UniDexGrasp++: Improving Universal Dexterous Grasping via Geometry-aware Curriculum Learning and Iterative Generalist-Specialist Learning
Weikang Wan*, Haoran Geng*, Yun Liu, Zikang Shan, Li Yi, Yaodong Yang, and He Wang ICCV, 2023, Oral presentation with all top rankings, best paper finalist Paper | Website | Code We improve our previous method, making it object-agnostic and much more effective. |
|
UniDexGrasp: Universal Robotic Dexterous Grasping via Learning Diverse Proposal Generation and Goal-Conditioned Policy
Yinzhen Xu*, Weikang Wan*, Jialiang Zhang*, Haoran Liu*, Zikang Shan, Hao Shen, Ruicheng Wang, Haoran Geng, Yijia Weng, Jiayi Chen, Tengyu Liu, Li Yi, and He Wang CVPR, 2023 Paper | Website | Code We propose a method to learn dexterous grasping policies able to handles diverse objects based on realistic observations. |
|
This website is adapted from Jon Barron's website and deployed on Github Pages. Last updated on May 1, 2025. |